数字识别用传统的机器学习就可以做到蛮高的准确率,使用神经网络,完全也可以用全连接的网络来识别,无非是一个多分类的问题。和我们平时做多分类没有差别。这里我们用卷积神经网络(CNN)来做,CNN在图像识别上应用非常广泛。因为全连接神经网络的输入是一个向量,把图片按照行连接成一个向量,就会把空间信息给抹掉。这就是CNN要解决的,要利用空间信息,来找patterns,比如要识别一只鸟,图片中有一小块是一个鸟嘴,这对识别鸟是有用的。
CNN概述
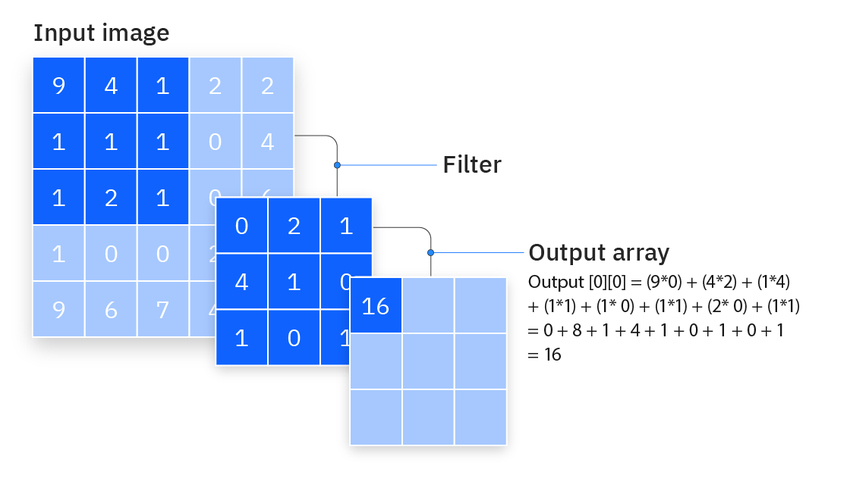
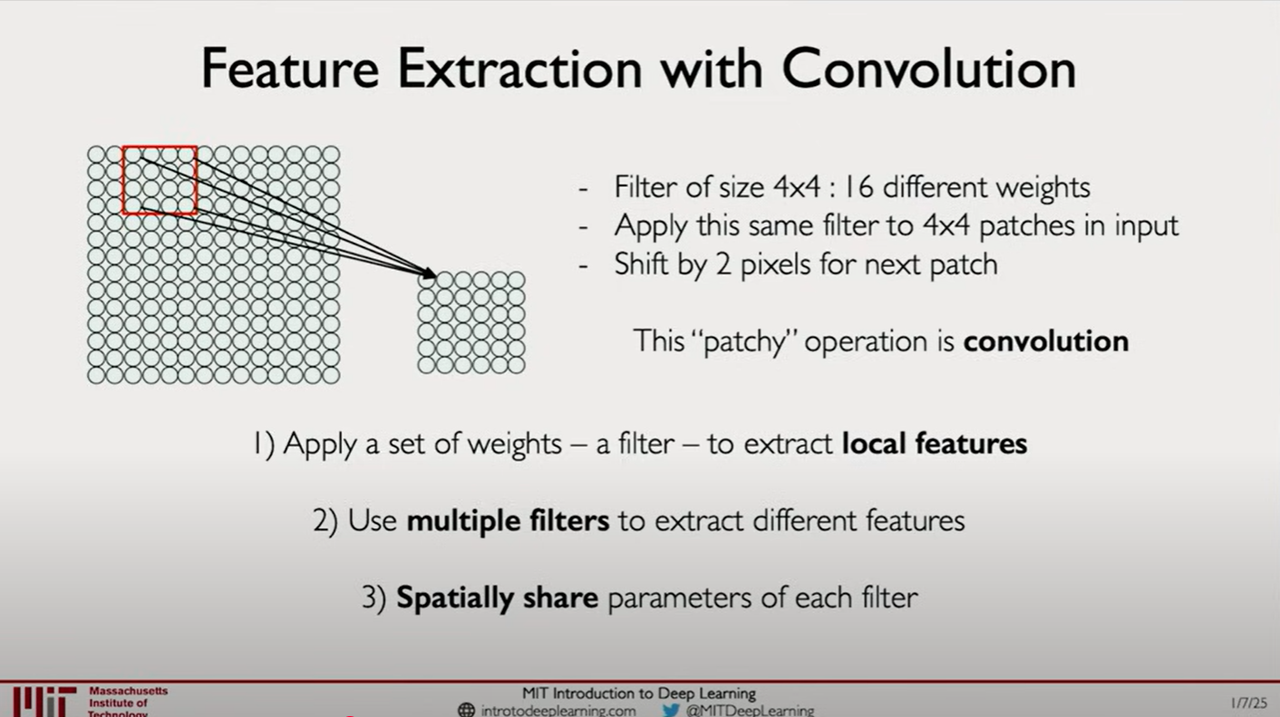
CNN和全连接的神经网络的区别首先在在于它传递的数据是有形状的,也就是前面说的要利用空间信息,所以用sliding windows的策略,扫描一个又一个的窗口(patches),这个窗口每次扫描就用一个滤波器(filter)去做inner product,一个窗口出来是一个值。
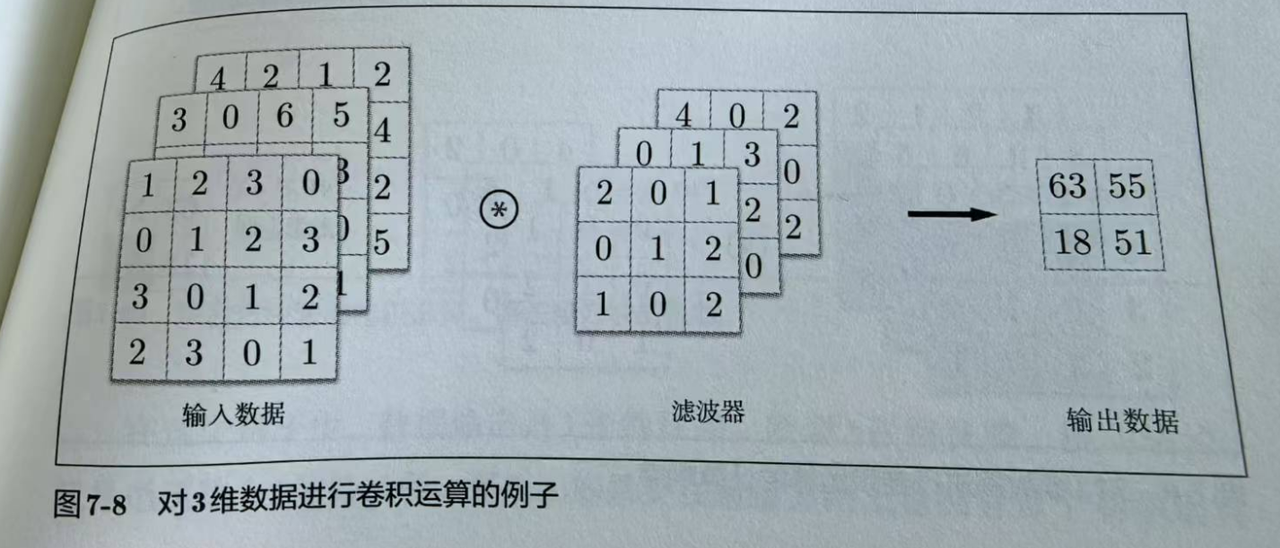
这一个滤波器作用于这一个通道上,会出来另一个大小不一样的二维数据,所以输入输出有时候又可以统一称之为特征图。输入通常不是一个通道,比如说RGB的图,就有RGB三个通道,最终的输出是每一个通道都一样的做法,然后将多个通道进行加和。
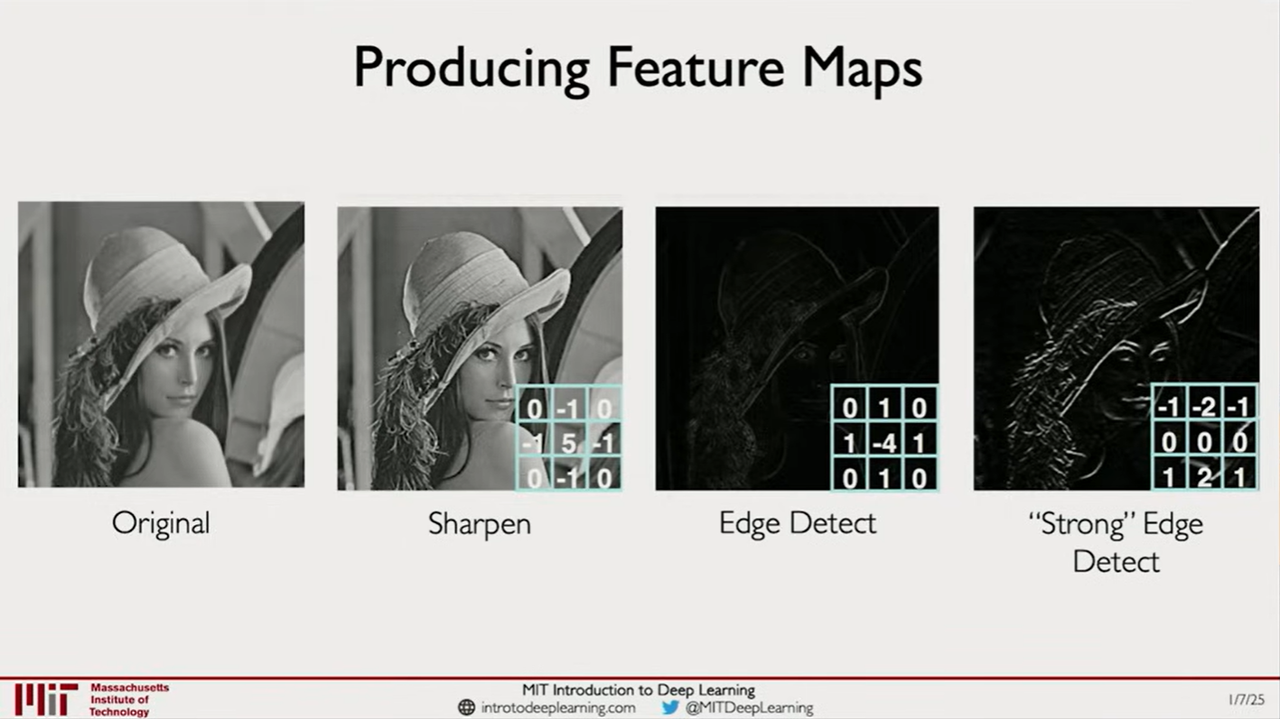
滤波器主要用于提取图像的特征,比如下面这张图所演示的。
一个滤波器出来一张特征图,多个滤波器就会出来多个特征图,就像RGB的图有三个通道一样,用N个滤波器,出来的数据就有N个通道,每个通道是2D的数据,整个是一个3D的数据,我们依然可以理解成一张图,原来的图是3个通道,现在有N个通道了,不是我们理解的RGB图像,但形式上是一致的。这就是卷积的过程。
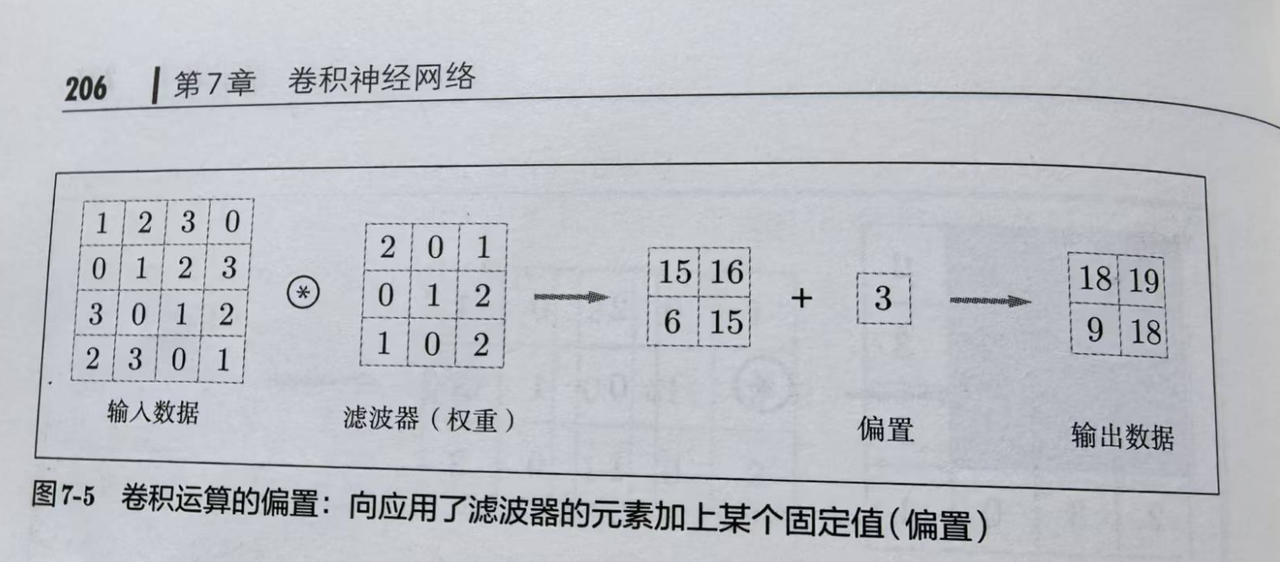
滤波器里的数值,相当于我们在全连接神经网络中权重,也会加上偏置,这些参数都是学习出来的。
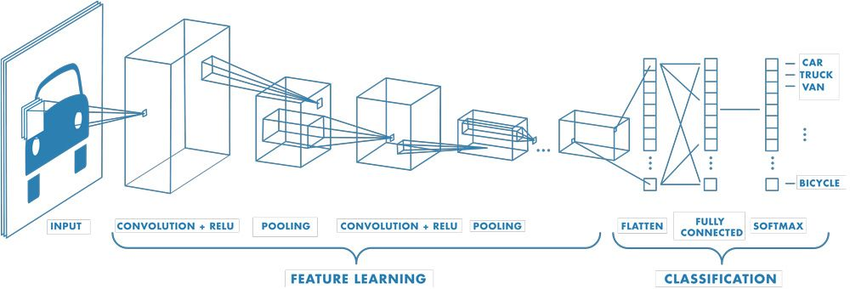
一个典型的卷积神经网络就是卷积→激活→池化,可以是一个这样的过程,也可以连着搭几个。这个做为Feature learning,把图像的特征学出来,然后用这些特征做为输入,接一个全连接的神经网络(也被称之为dense network),这就是完整的CNN。
卷积层
运算就是前面讲到的相当于图像处理的滤波器运算。这里涉及到一些和运算细则有关的概念,包括kernel size, padding和stride,这些会影响到输出的数据形状大小,这也要算一下的,因为最终要过一下全连接层,输入的大小是要准确指定的。
滤波器(filter/kernel)
滤波器有时候也叫kernel,因为滤波器是不需要我们指定的,也是学出来的,我们要指定的只有滤波器的数量,也是输出的channel数目,还有滤波器的大小,kernel size。
填充(padding)
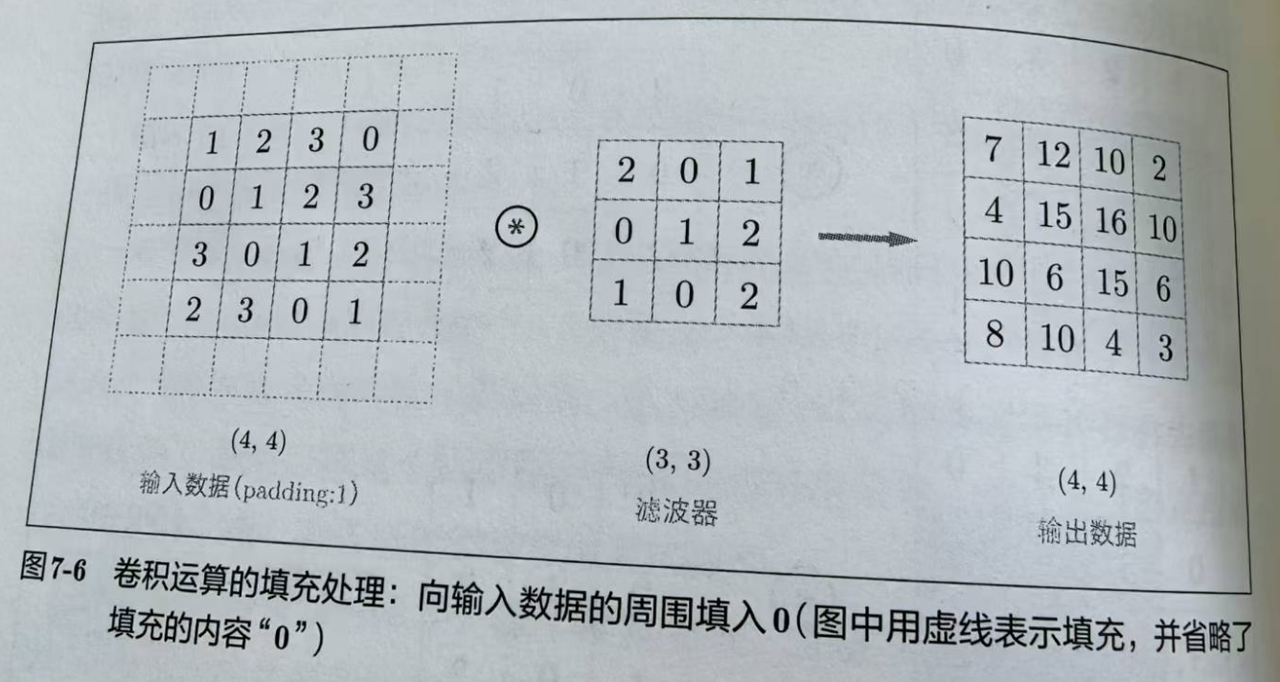
一个4x4的数据,用一个3x3的滤波器,输出的数据就变成了2x2,所以这样子,如果叠加卷积层,就有可能在中间变成1x1,后面没法再继续做卷积了。所以就需要在数据的边缘进行填充,像下面这个例子,通过填充就可以让输入和输出保持4x4的形状。
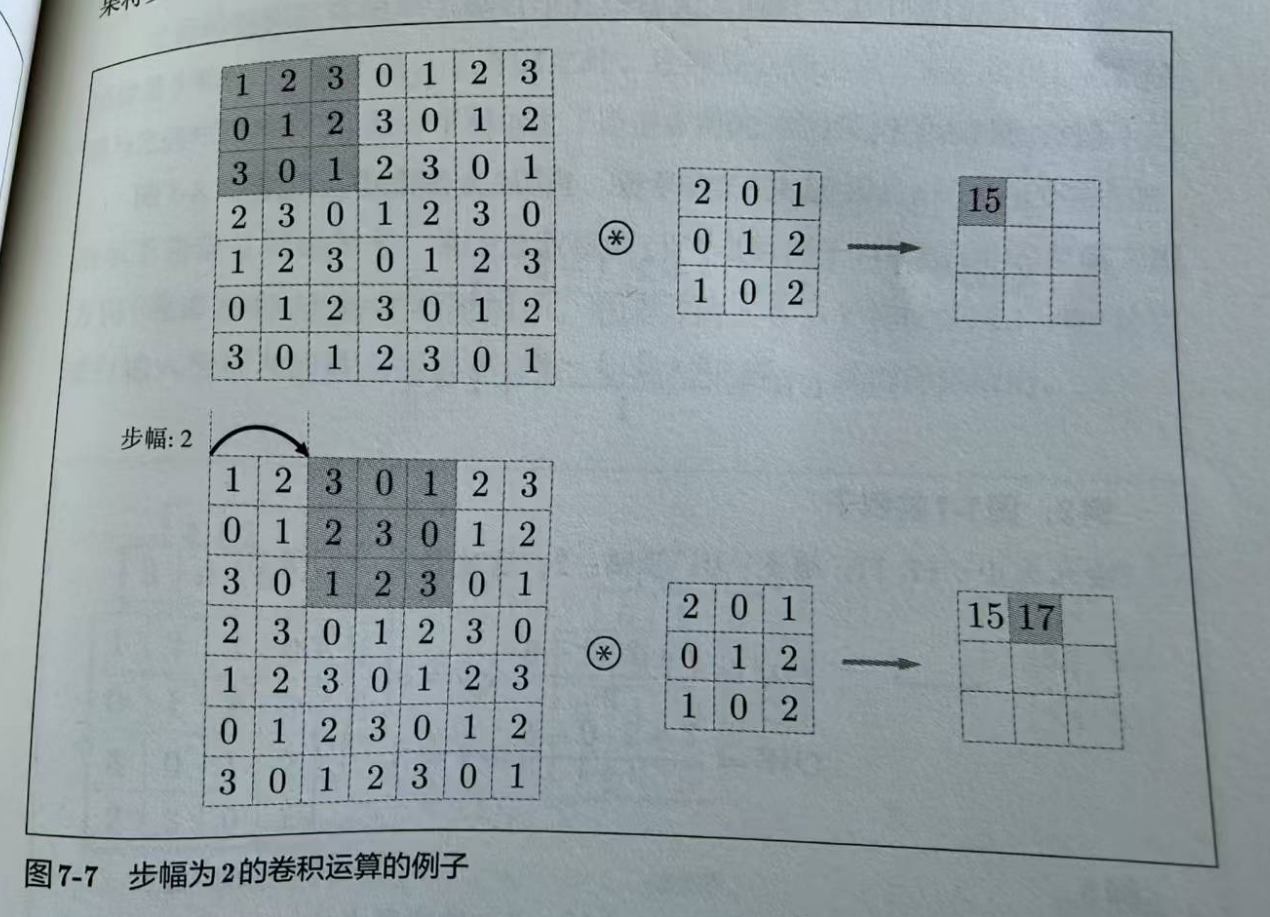
步幅(stride)
在应用滤波器时,通过移动窗口,把所有的数据都过一遍,窗口和窗口之间是有重叠的,移动窗口的步伐有多大,就是步幅。
池化
典型的CNN包括卷积→激活→池化,激活就是ReLU这些,都很清楚,最后就池化:
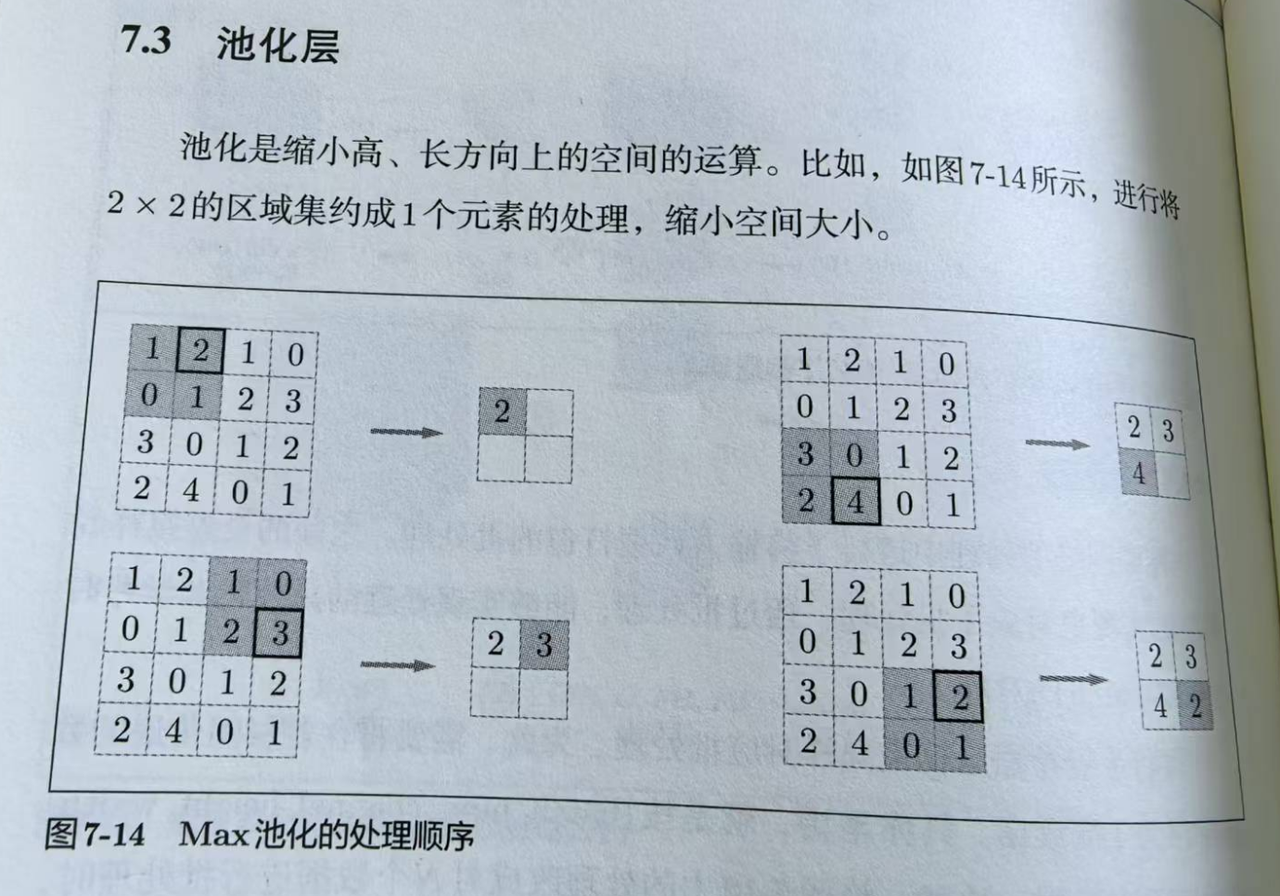
池化没有需要学习的参数,就是在目标区域里取个代表性的值,上图是最大值,也可以是平均值。池化是在每个通道单独进行,所以不会改变通道数。
输入数据发生一点微小的变化,通过池化,输出基本上是不变的,这样就具有一定的鲁棒性。当然其实池化最主要的作用是让数据变小,这本身是为了更高效的计算。从这个角度来说,计算资源够的情况下,是可以不需要池化的。
书上讲的都是说让数据变小这一点,我自己想到的是,因为卷积运算可以套好几个,那么经过池化之后,再做同样大小的滤波运算,相当于在更大的区域去捕获特征了。我认为是有这个作用的,相当于前面是低空看细节,后面高空看轮廓,有这样一个过程的作用。
另外也要看实际情况,对于一般的图像处理来说,池化的过程,相当于压缩了图片,压缩完图片看着变化不大。AlphaGO就使用了CNN,但是它就没有用池化,因为池化了之后,棋盘就不完整了,这和图像处理是有区别的,所以它不能够用池化。所以说,还得具体情况具体分析。
PyTorch实战
数据
这里使用的是MNIST手写数字的数据集,有6万张图片。先创建文件夹,然后下载,如果文件已经存在,就跳过下载。
from pathlib import Path
import requests
DATA_PATH = Path("data")
PATH = DATA_PATH / "mnist"
PATH.mkdir(parents=True, exist_ok=True)
URL = "https://github.com/pytorch/tutorials/raw/main/_static/"
FILENAME = "mnist.pkl.gz"
if not (PATH / FILENAME).exists():
content = requests.get(URL + FILENAME).content
(PATH / FILENAME).open("wb").write(content)这个数据是个pickle文件,存的是numpy array格式,我们相应地把它解压缩,讲进来。
import pickle
import gzip
with gzip.open((PATH / FILENAME).as_posix(), "rb") as f:
((x_train, y_train), (x_valid, y_valid), _) = pickle.load(f, encoding="latin-1")总共有6万张图片,5万张是训练集,1万张做为验证/测试集。
图片是28x28像素的,已经被打成长度为784的一维向量。
我们可以随便选一张画出来看看:
from matplotlib import pyplot as plt
import numpy as np
plt.imshow(x_train[9].reshape((28,28)), cmap='gray')
NumPy to Tensor
因为是numpy array格式,我们需要转换成tensor。
import torch
x_train, y_train, x_valid, y_valid = map(
torch.tensor, (x_train, y_train, x_valid, y_valid)
)DataLoader
from torch.utils.data import TensorDataset
from torch.utils.data import DataLoader
bs = 64
train_ds = TensorDataset(x_train, y_train)
train_dl = DataLoader(train_ds, batch_size=bs)
valid_ds = TensorDataset(x_valid, y_valid)
valid_dl = DataLoader(valid_ds, batch_size=bs * 2)我们使用TensorDataSet来存这些数据,同时存samples和labels,再用DataLoader来方便我们访问和迭代这些数据,其中一个参数是batch_size,也就是批处理的大小,指定一次有多少个数据打包喂给神经网络。
模型
首先是看看有没有GPU,有则设备设为’cuda’,没有就设为’cpu’。我们的运算都在指定的device上进行。
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')训练步骤
训练的代码都基本一样,我们把它写成一个函数,方便调用。
def train_step(model: torch.nn.Module,
data_loader,
loss_fn,
optimizer,
acc_fn,
device = device):
train_loss, train_acc = 0, 0
for batch, (X, y) in enumerate(data_loader):
X, y = X.to(device), y.to(device)
model.train()
y_pred = model(X)
loss = loss_fn(y_pred, y)
train_loss += loss
train_acc += acc_fn(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_loss /= len(data_loader)
train_acc /= len(data_loader)
print(f"Train loss: {train_loss:.5f} | Train accuracy: {train_acc:.2f}")测试步骤
测试步骤也是同样的道理,也写成函数:
def test_step(model,
data_loader,
loss_fn,
acc_fn,
device = device):
test_loss, test_acc=0, 0
model.eval()
with torch.inference_mode():
for X, y in data_loader:
X, y = X.to(device), y.to(device)
test_pred = model(X)
test_loss += loss_fn(test_pred, y)
test_acc += acc_fn(test_pred.argmax(dim=1), y)
test_loss /= len(data_loader)
test_acc /= len(data_loader)
print(f"Test loss: {test_loss:.5f} | Test accuracy: {test_acc:.2f}\n")CNN模型
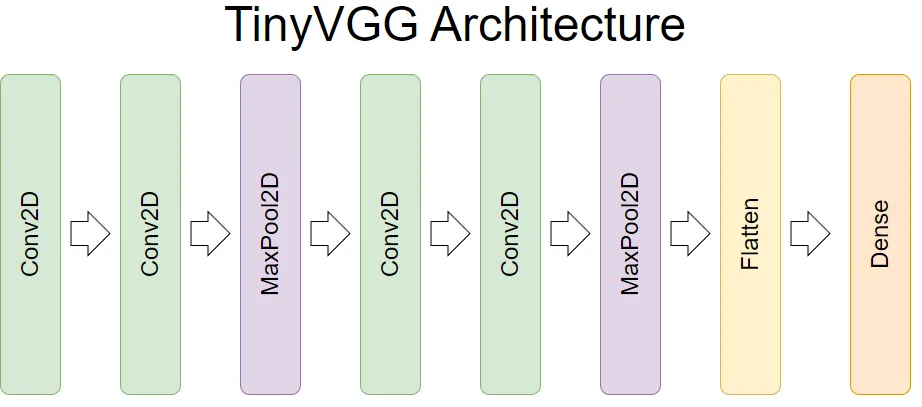
我们用https://poloclub.github.io/cnn-explainer/里的CNN架构,包含两个结构一样的blocks。

这个架构是有名的VGG的简化版本,TinyVGG:
from torch import nn
class MNIST(nn.Module):
def __init__(self, input_shape, hidden_units, output_shape):
super().__init__()
self.block_1 = nn.Sequential(
nn.Unflatten(1, (1, 28, 28)),
nn.Conv2d(
in_channels = input_shape,
out_channels = hidden_units,
kernel_size = 3,
stride=1,
padding=1),
nn.ReLU(),
nn.Conv2d(
hidden_units, hidden_units, 3, stride=1, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2,
stride=2)
)
self.block_2 = nn.Sequential(
nn.Conv2d(hidden_units, hidden_units, 3, padding=1),
nn.ReLU(),
nn.Conv2d(hidden_units, hidden_units, 3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.classifier = nn.Sequential(
nn.Flatten(),
nn.Linear(in_features=hidden_units*7*7,
out_features=output_shape)
)
def forward(self, x):
return self.classifier(self.block_2(self.block_1(x)))两个blocks都是Conv2d→ReLU→Conv2d→ReLU→MaxPool2d。参数前面都有解析过相应的概念了,这里需要讲的是在block_1里用了nn.Unflatten,是因为原来的数据28x28像素已经被转成一维向量了,所以此处需要搞回2维的数据。然后这里的卷积运算,用的kernel_size=3,stride=1,padding=1,这样子数据的形状大小是不变的;再通过MaxPool2d的时候,kernel_size=2, stride=2,所以一个2x2的数据就变成了1个数,数据就从28x28,变成了14x14。有两个blocks,过了两次MaxPooling,最终就变成了7x7,所以最后给nn.Linear的数据,就是7x7xhidden_units(也就是最后数据的通道数)。
训练模型
先初始化一个模型,input_shape就是传给卷积层的通道数,这里是灰度图,所以只有一个通道,hidden_units就是中间的通道数,而output_shape就是最后过全连接神经网络的输出,因为是0-9的数据,所以是10个分类。
torch.manual_seed(42)
model = MNIST(input_shape=1, hidden_units=10, output_shape=10).to(device)还有相应的损失函数和优化器等:
from torchmetrics.classification import Accuracy
acc_fn = Accuracy(task="multiclass", num_classes=10).to(device)
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(params=model.parameters(),
lr=0.1)万事俱备,我们就可以开始训练了,有了前面训练步骤和测试步骤两个函数,就是把这些模型、损失函数、准确率函数和优化器给传进去就可以了。换一个模型和相应的这些函数,再传进去,就变成了训练另一个模型。
from timeit import default_timer as timer
start_time = timer()
epochs = 3
for epoch in range(epochs):
print(f"Epoch: {epoch}\n---")
train_step(model=model,
data_loader=train_dl,
loss_fn=loss_fn,
optimizer=optimizer,
acc_fn=acc_fn)
test_step(model=model,
data_loader=valid_dl,
loss_fn=loss_fn,
acc_fn=acc_fn)
end_time = timer()
准确率达到了98%,6万张图片过了3遍,只用了17秒。
评估
y_preds = []
model.eval()
with torch.inference_mode():
for X, y in valid_dl:
X, y = X.to(device), y.to(device)
y_logit = model(X)
y_pred = torch.softmax(y_logit, dim=1).argmax(dim=1)
y_preds.append(y_pred.cpu())
y_pred_tensor = torch.cat(y_preds)把验证数据集传给模型,把预测的结果拿到。我们就可以用前面定义的acc_fn来算一下准确率。
和前面那个测试步骤最后的准确率是一样的,因为我们这里用的同一个数据集,也就是说这个数据集,既拿来测试,又拿来验证。一般情况下,我们可以把数据分成3个数据集,一个训练,一个验证,一个测试。因为这个下载的MNIST数据,本身就是分两块的,懒得再去切分它,就先这样用了。
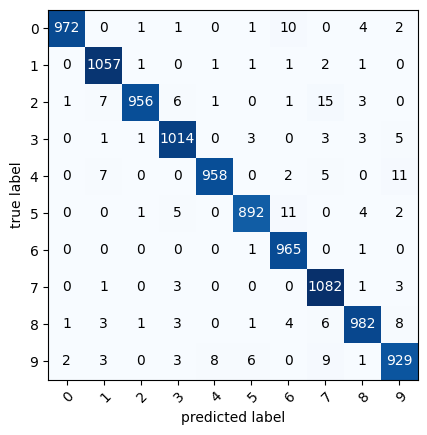
单纯一个准确率,是不清楚那些分类做得不好的,我们可以用混淆矩阵来看一下。
from torchmetrics import ConfusionMatrix
confmat = ConfusionMatrix(num_classes=10, task='multiclass')
confmat_tensor = confmat(preds=y_pred_tensor, target=y_valid)这个代码就计算出了混淆矩阵,我们再画个图来看:
from mlxtend.plotting import plot_confusion_matrix
fig, ax = plot_confusion_matrix(
conf_mat = confmat_tensor.numpy(),
class_names = range(10)
)